\citet[p.~22ff]{Marr:1982kx} distinguishes:
\begin{itemize}
\item computational description---What is the thing for and how does it achieve this?
\item representations and algorithms---How are the inputs and outputs represented, and how is the transformation accomplished?
\item hardware implementation---How are the representations and algorithms physically realised?
\end{itemize}
Recall David Marr’s famous three-fold distinction
between levels of description of a system: the computational theory, the
This is easy to understand in simple cases.
To illustrate, consider a GPS locator.
It receives information from four satellites and tells you where on Earth the device is.
There are three ways in which we can characterise this device.
1. computational description
First, we can explain how in theory it is possible to infer the
device’s location from it receives from satellites.
This involves a bit of maths: given time signals from four different satellites,
you can work out what time it is and how far you are away from each
of the satellites.
Then, if you know where the satellites are and what shape the Earth is,
you can work out where on Earth you are.
-- What is the thing for and how does it achieve this?
The computational description tells us what the GPS locator does and
what it is for.
It also establishes the theoretical possibility of a GPS locator.
But merely having the computational description does not enable you to build
a GPS locator, nor to understand how a particular GPS locator works.
For that you also need to identify representations and alogrithms ...
2. representations and algorithms
At the level of representations and algorthms we specify
how the GPS receiver represents the information it receives from the satellites
(for example, it might in principle be a number, a vector or a time).
We also specify the algorithm the device uses to compute the time and its location.
The algorithm will be different from the computational theory: it is a procedure
for discovering time and location.
The algorithm may involve all kinds of shortcuts and approximations.
And, unlike the computational theory, constraints on time, memory and other
limited resources will be evident.
So an account of the representations and algorithms tells us ...
-- How are the inputs and outputs represented, and how is the transformation accomplished?
3. hardware implementation
The final thing we need to understand the GPS locator is a description of the
hardware in which the algorithm is implemented. It’s only here that
we discover whether the device is narrowly mechanical device, using cogs, say,
or an electronic device, or some new kind of biological entity.
-- How are the representations and algorithms physically realised?
The hardware implementation tells us how the representations and algorithms are represented physically.
Marr (1992, 22ff)
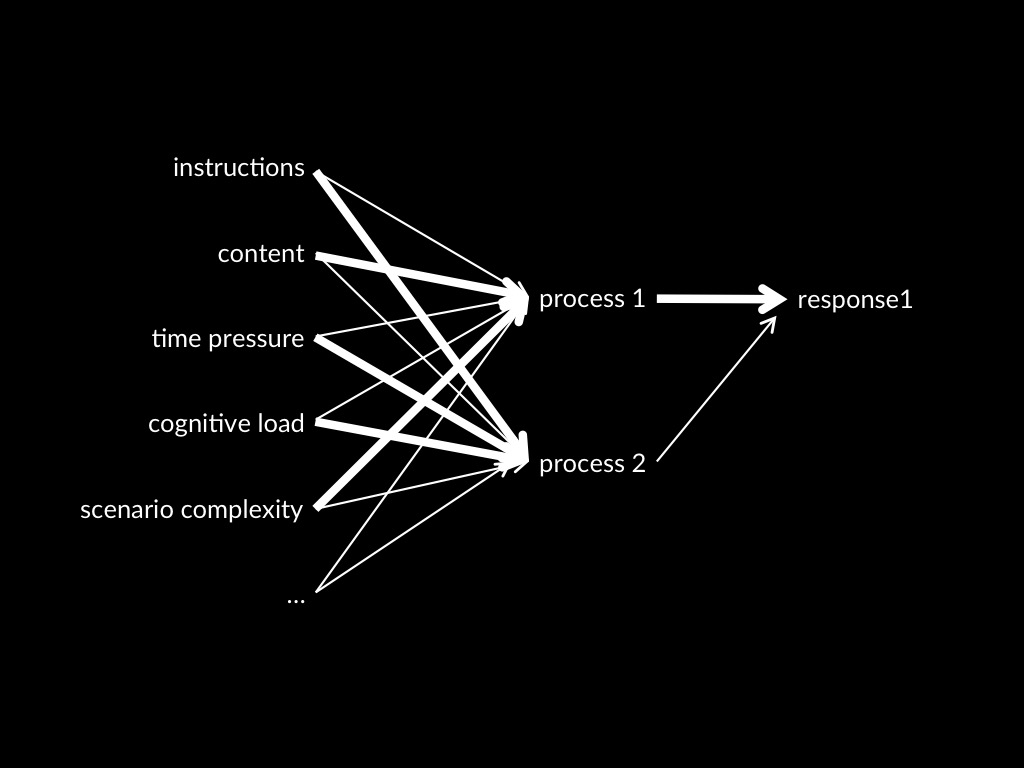
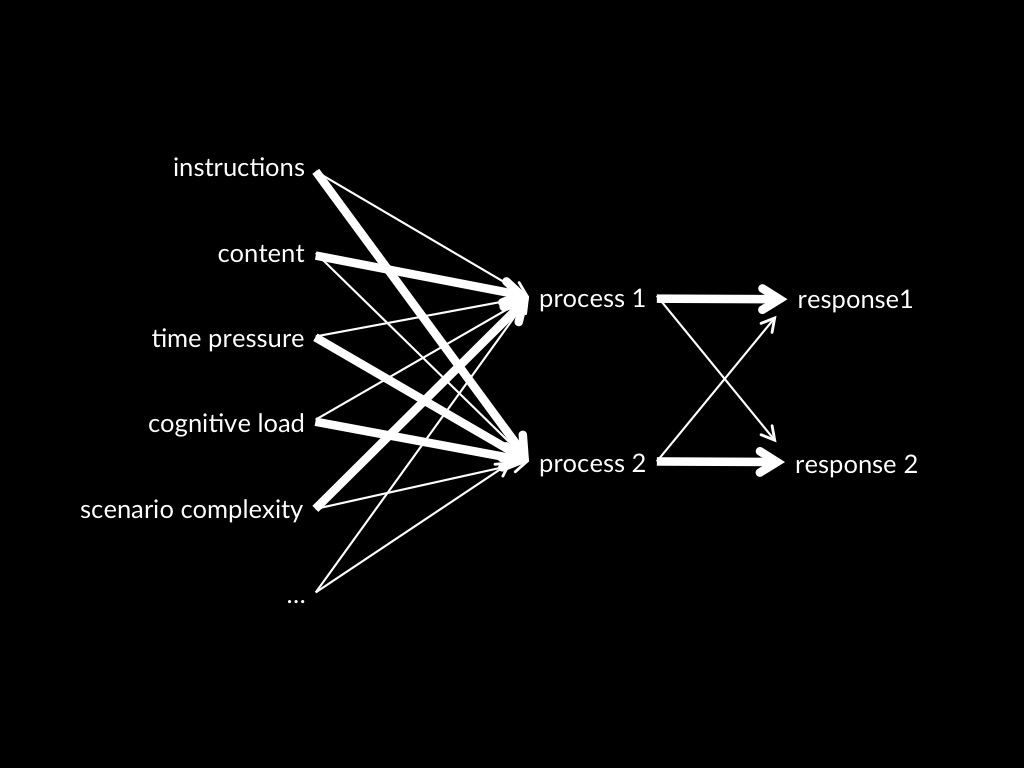
What we need to make progress with the three questions is a hypothesis about the processes
(representations and algorithms in Marr’s terms).